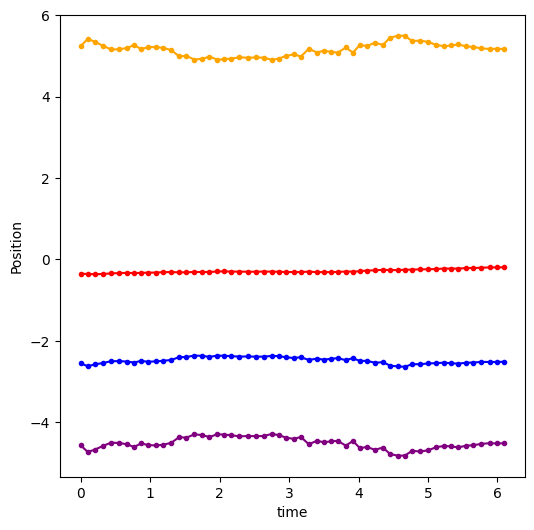
In the human body, joints are the points where two or more bones meet. The position of a joint can be described in both local and global coordinates. Local coordinates define the position of a joint relative to an other joint (or COM) rather than to an external reference point, while a global or stationary coordinate system is imposed on each frame of data, with the origin at the same location in each frame(external reference point).
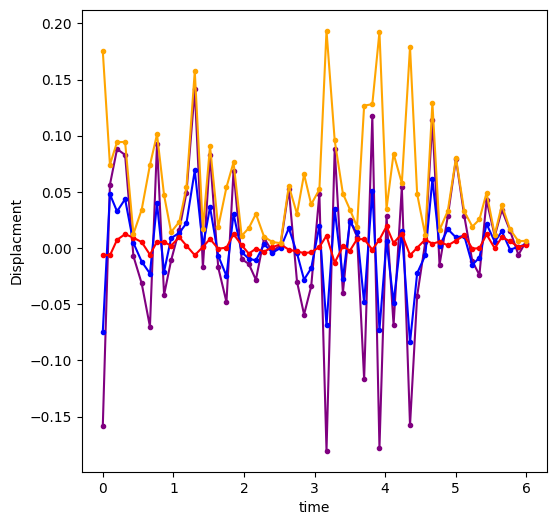
The displacement in the human body's joint refers to the movement of a joint relative to it's previous location. This movement occurs in three directions.
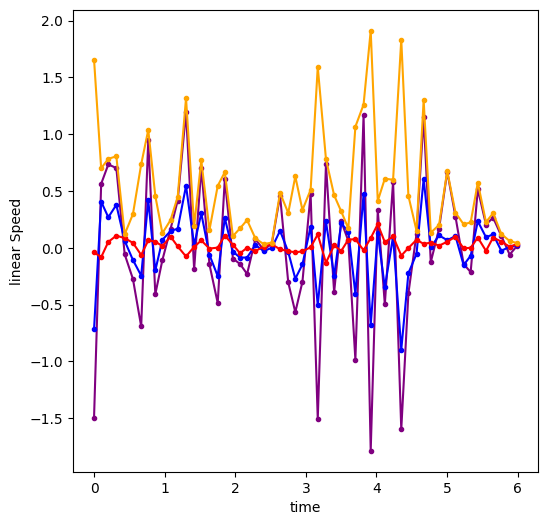
Linear speed is the measure of the concrete distance travelled by a moving object. The speed with which an object moves in the linear path is termed linear speed. In easy words, it is the distance covered for a linear path in the given time.
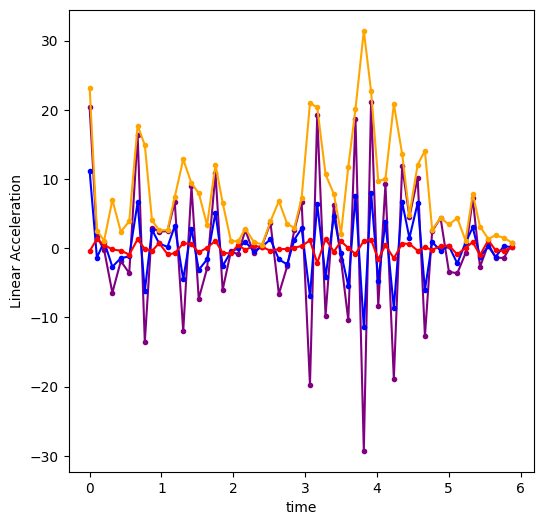
Linear acceleration refers to the rate of change of velocity in a straight line. In the context of human body joints, linear acceleration can be defined as the change in velocity of a joint moving in a straight line, such as the arm or leg, during a specific time interval. This acceleration can occur in any direction and is influenced by various factors such as the force applied and the mass of the body part.
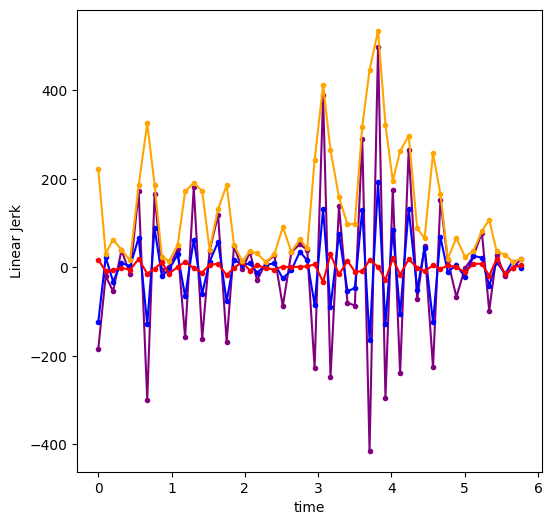
The linear jerk in the human body's joint refers to the rate of change of acceleration with respect to time. In other words, it is the sudden change in acceleration that occurs within the joint during movement. This can be caused by a variety of factors, including muscle imbalances, joint misalignments, or improper movement patterns.
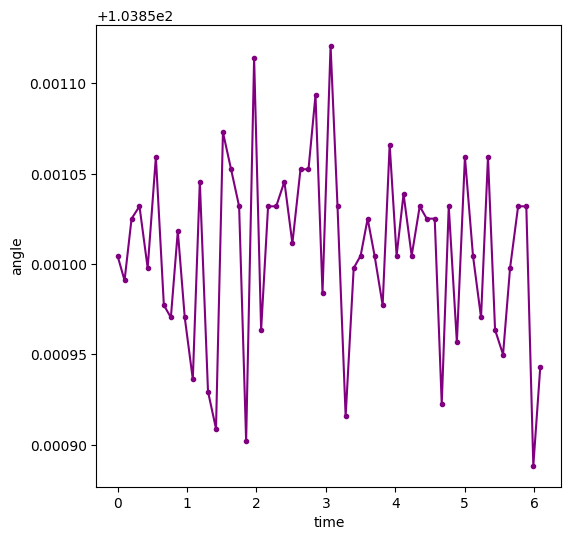
Joint Range of Motion (ROM) refers to the extent to which a particular joint in the body can be moved in various directions. It describes the full range of movement that a joint is capable of, from its fully extended position to its maximum flexed position. Joint ROM is commonly used to assess the flexibility, mobility, and overall health of joints.
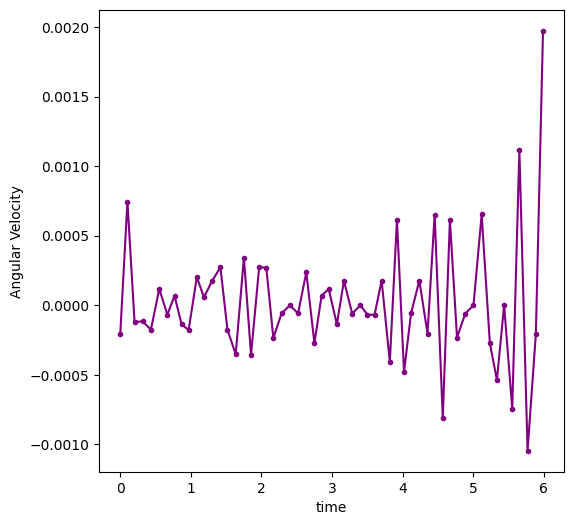
Angular velocity refers to the rate at which a joint in the human body rotates around its axis (change of angle over time). It is measured in radians per second (rad/s) and is a crucial aspect of human movement. The angular velocity of a joint is determined by the angle of rotation and the time taken to complete that rotation.
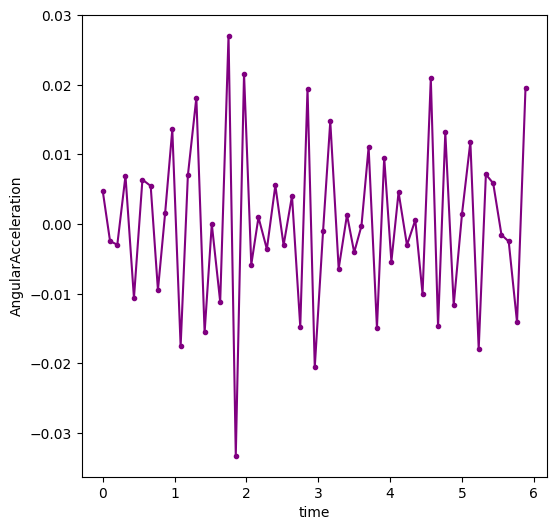
Angular acceleration refers to the rate of change of angular velocity with respect to time. In the human body's joint, angular acceleration is the measure of how quickly the joint's angular velocity changes over time. This is an important factor in understanding the movement and control of the human body.
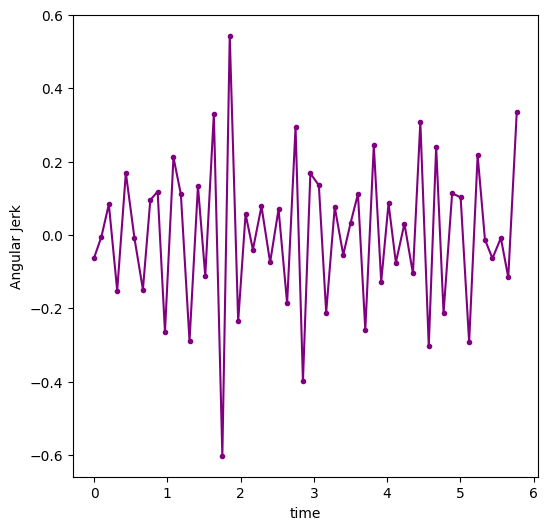
Angular jerk is a term used in biomechanics to describe the rate of change of angular acceleration in a joint. It is a measure of how quickly the joint is accelerating or decelerating, and is particularly relevant in activities that require sudden changes in direction or speed.
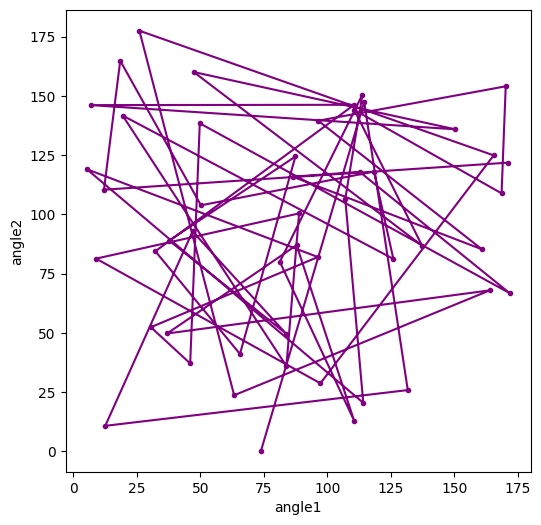
This plot illustrates how an angle to angle plot is used to represent joint movement in the human body. The x-axis displays the angle of joint 1, while the y-axis shows the angle of joint 2. This type of plot is commonly used to track joint movement, particularly in medical contexts.
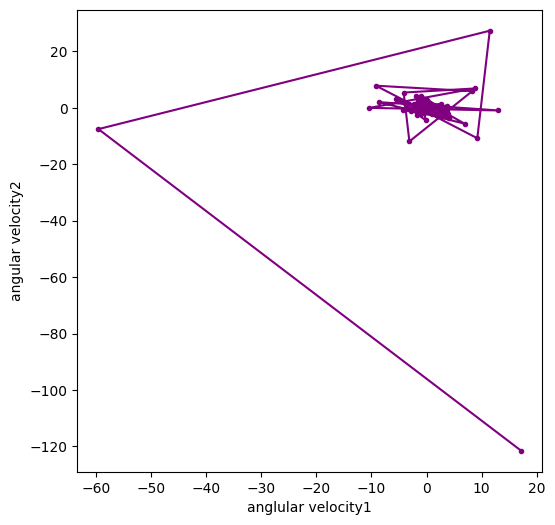
The angular velocity of joint1 to angular velocity of joint2 plot in the human body's joint represents the relationship between the rotational speed of joint1 along the x-axis and the rotational speed of joint2 along the y-axis. This plot is commonly used in biomechanics to analyze the movement of joints and to identify any potential issues related to joint function.
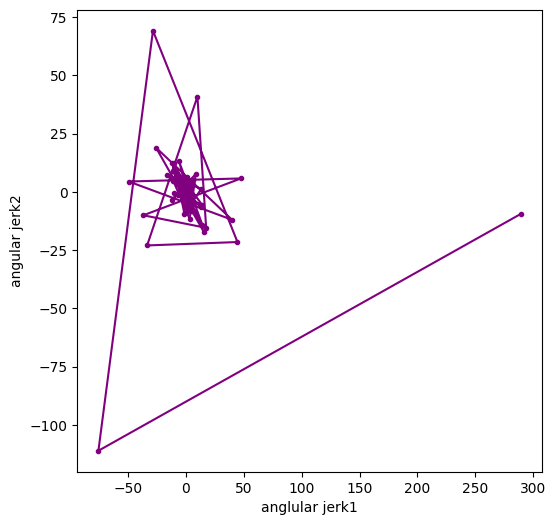
The Angular jerk of joint1 to Angular jerk of joint2 plot is a representation of the rate of change of the angular acceleration of these two joints in the human body. Joint1 refers to the x-axis and joint2 to the y-axis. This plot is useful in analyzing the motion of these joints and identifying any abnormalities or irregularities in their movement.
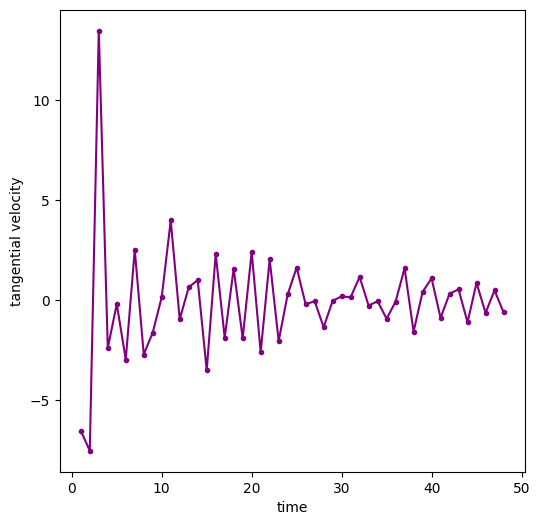
Tangential velocity refers to the speed at which an object moves along a curved path. In the human body, joints play a significant role in determining tangential velocity. When a joint rotates, it causes the limbs to move in a circular motion, and the speed of this movement is tangential velocity.
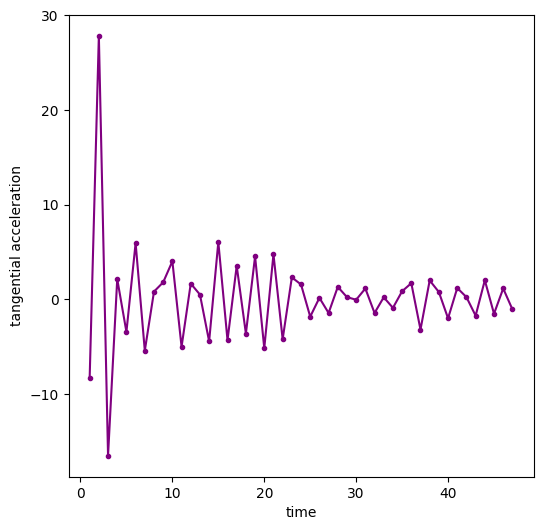
Tangential acceleration in the human body refers to the acceleration experienced by a body moving along a curved path. In the case of joints, tangential acceleration is experienced as the joint moves through its range of motion. This acceleration is caused by the changing direction of the joint's movement as it rotates around its axis.
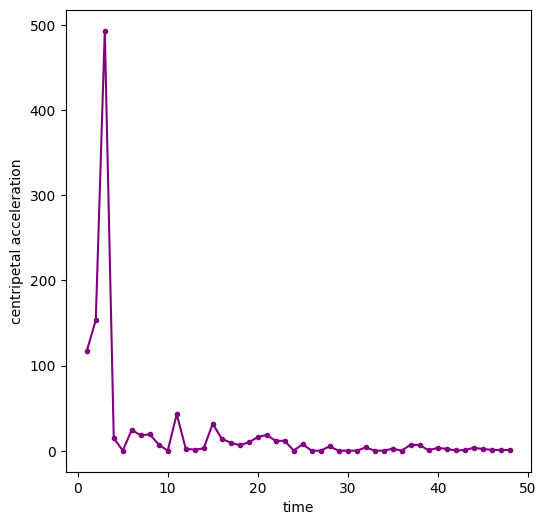
Centripetal acceleration is the acceleration experienced by an object moving in a circular path. In the human body, this acceleration is generated by the joints. When a joint rotates, it moves in a circular path, and the tissues surrounding the joint experience centripetal acceleration. The amount of centripetal acceleration depends on the speed and radius of the joint movement.
The angular acceleration of joint 1 to the angular acceleration of joint 2 in the human body's joint can be defined as the rate of change of angular velocity with respect to time. The x-axis represents the angular acceleration of joint 1, while the y-axis represents the angular acceleration of joint 2. This plot is useful in analyzing the movement of the human body and can be used in various fields such as medicine, sports, and biomechanics.
FlexiTrace Offers AI-powered Gait and Posture Analysis

